1.项目概述
1.1项目背景
应某单位要求,获取测区房屋1:500全要素地形地籍图,并采集房屋立面图。利用智航SF700A旋翼无人平台搭载T53P倾斜相机,进行农房倾斜摄影测量,获取高精度三维实景模型数据。基于三维实景模型采集地物属性信息和空间要素信息,生成测区范围的数字线划图及立面图。
1.2测区基本情况

1.3成果要求
最终生成的成果包括倾斜三维模型、地形地籍图、房屋立面图、立面图计量统计表。
2.技术路线
针对实际测区情况,以高精度得成果要求为标准,项目基于智航SF700A旋翼无人平台搭载T53P倾斜相机,借助相配套的南方航测数据处理软件体系,设计总体技术路线如下图所示:
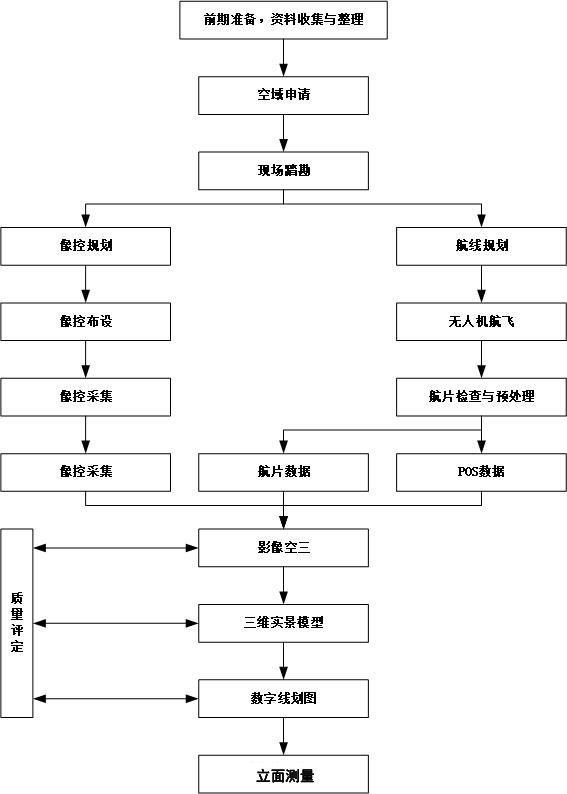
图1:技术路线
(1)像控点布设。为满足项目中多个环节得处理及检查要求,需要在测区内选取和实测一定数量的像控点。
(2)航测影像数据获取。利用旋翼无人机飞行平台,搭载五镜头设备,进行航测影像数据获取。
(3)照片数据预处理。无人机外业作业完成后,需要对差分数据和照片进行整理,包括POS和照片分组对齐、相片重命名等操作。
(4)影像空三。航测影像数据预处理完成后,依据影像POS信息、控制点信息,进行空中三角测量。
(5)成果数据生产。测区三维实景模型、数字表面模型生产是倾斜摄影技术中心时间最长的环节。借助专业软件,生成高精度三维实景模型。
(6)数字线划图及立面图生产。在三维数据采集软件中(南方三维测图软件uFeature3d),基于三维实景模型采集地物属性信息和空间要素信息,生成数字线划图及立面图。
3.方案实施
3.1像控点布设采集
借助南方航次一体化处理软件,提前规划好像控点,将规划好的像控分布通过云端服务器上传至云端服务器,为实际像控采集提供依据。
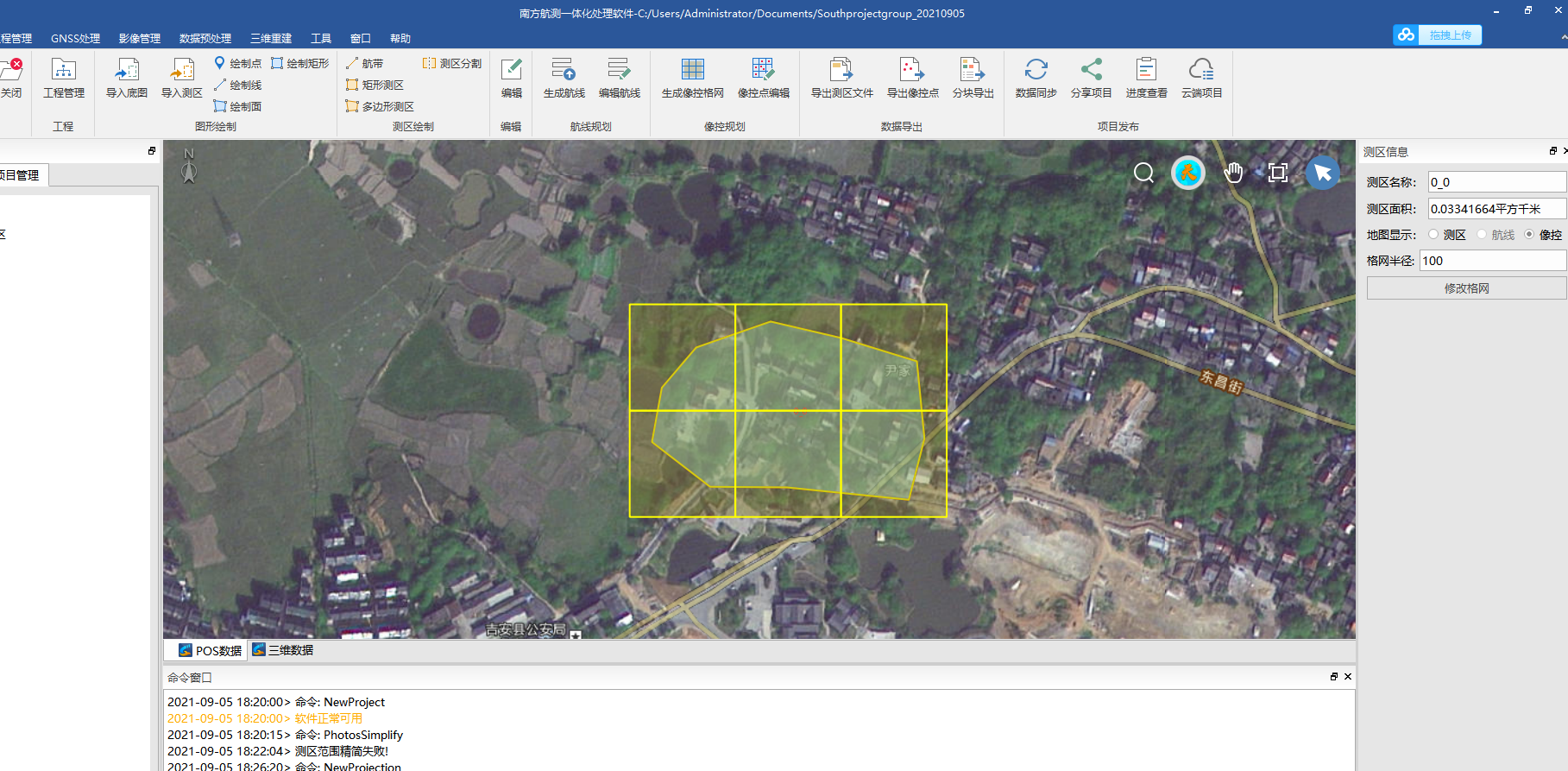
图2:像控点规划
通过southuav2.0软件,连接云端服务器,下载规划好的像控分布图,在现场布设采集像控。

图3:像控点采集
3.2 无人机外业数据采集
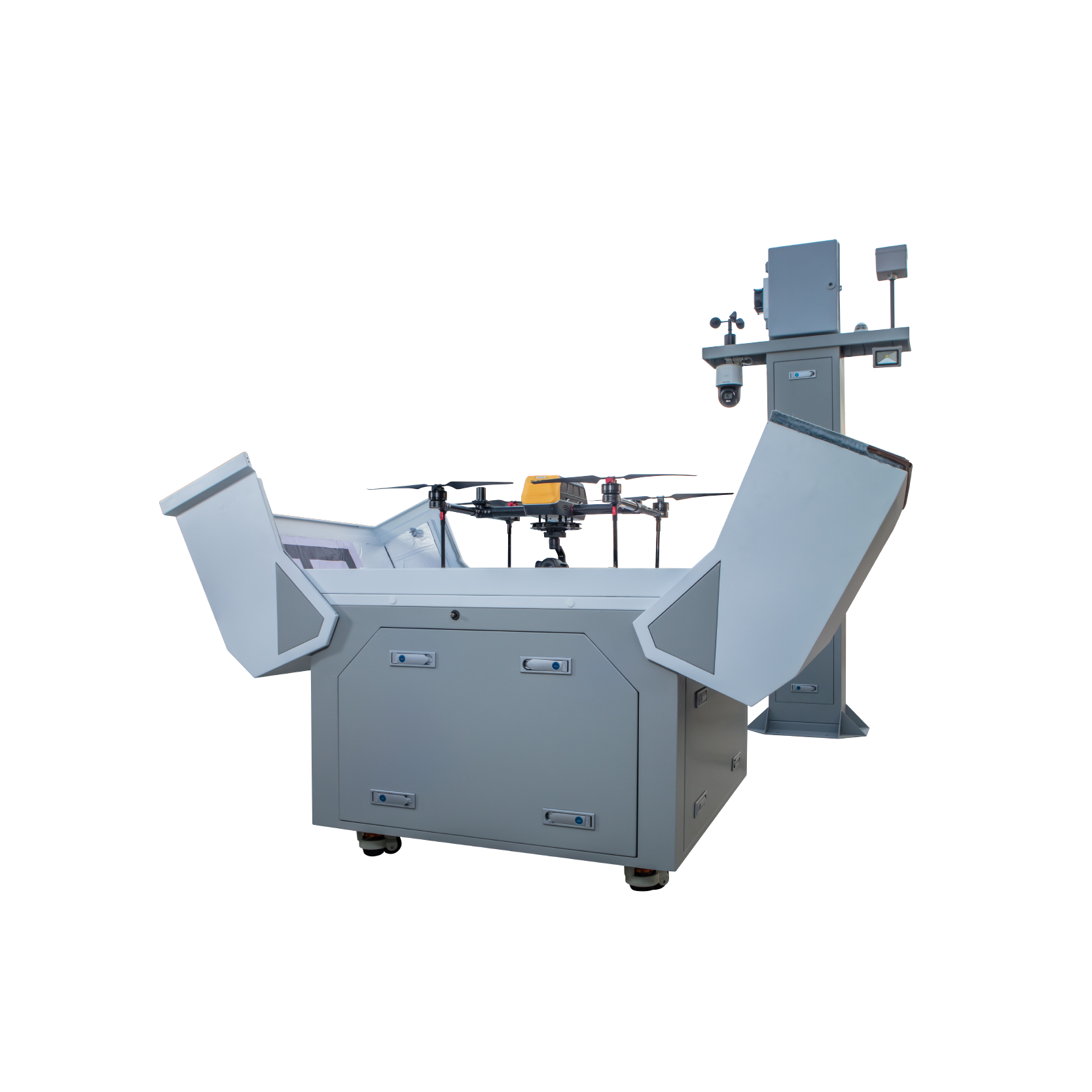
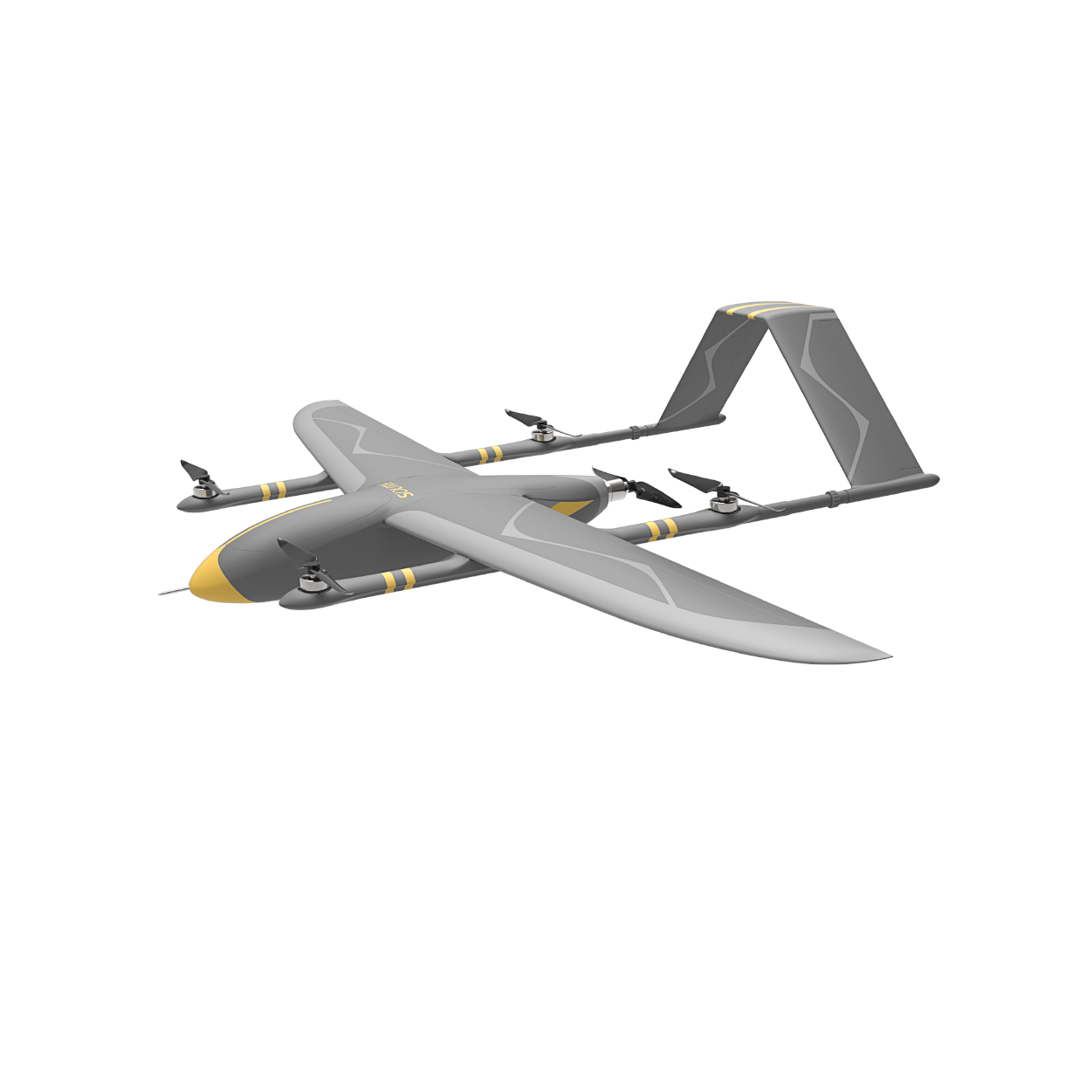
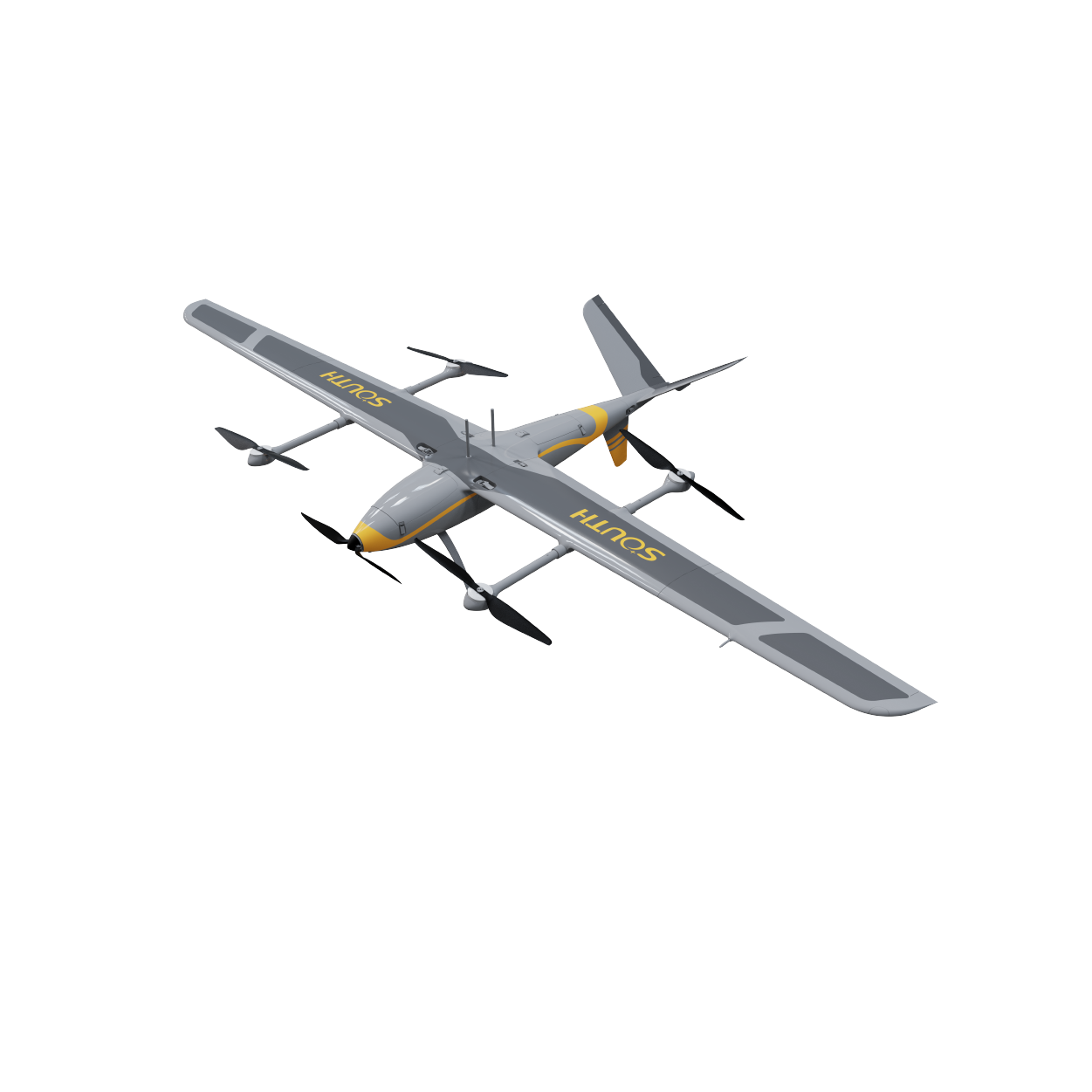
项目实施采用智航SF700A作为无人机飞行作业的平台,智航SF700A是目前市面上最为小巧得工业级智能无人机航空测量系统之一。具有上手块、精度高、航程长等优势。具备仿地飞行、PPK定位、毫米波雷达避障、下视激光雷达测距等功能配置。

图4:智航SF700A无人机
南方无人机T53P倾斜相机,是一款具备增稳得小巧云台,能够提高正射影像采集的精度与效率。T53P倾斜5镜头相机具有全自动修复,总像素1.2个亿,完全满足此次项目精度要求。
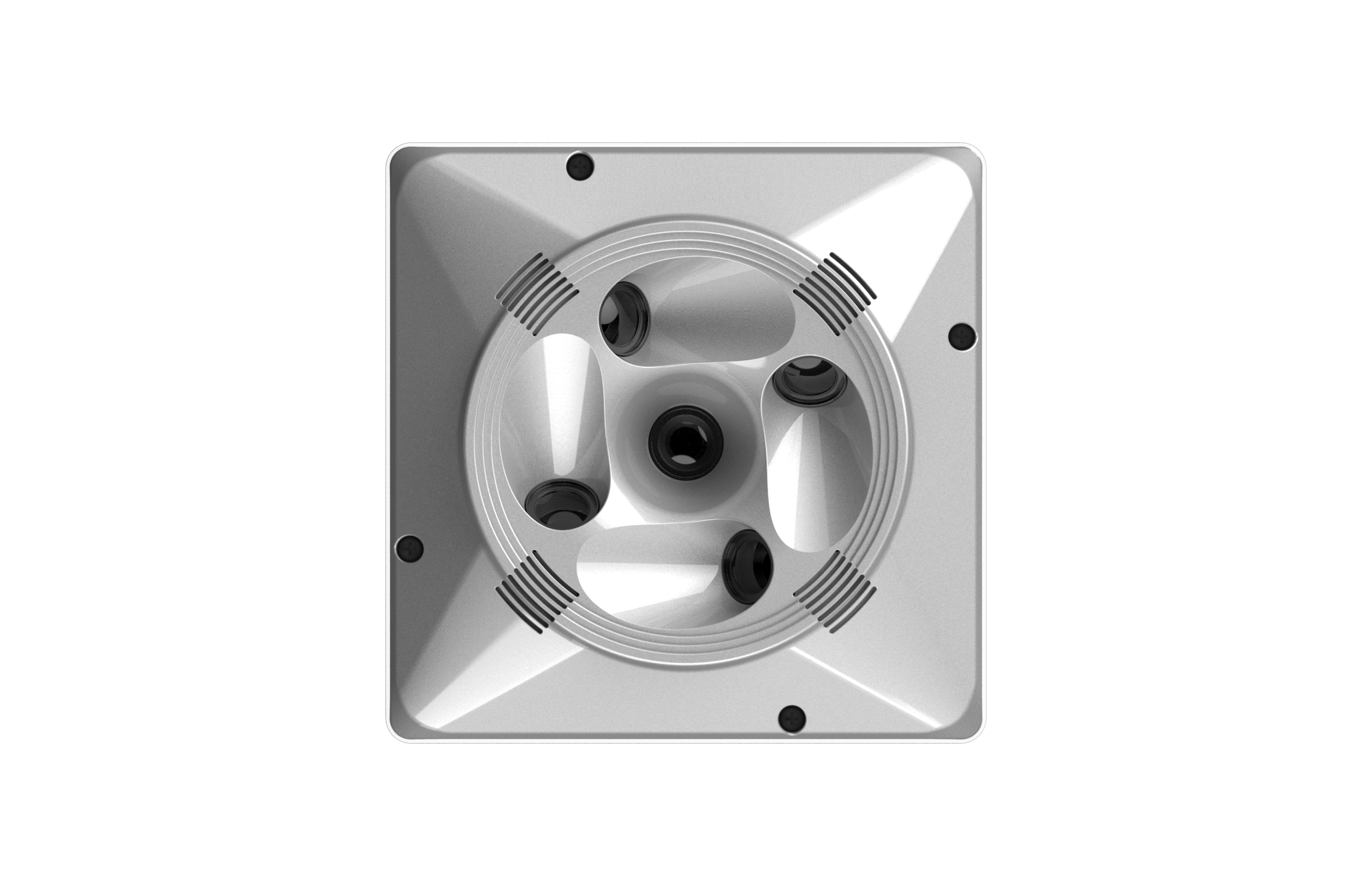
图5:T53P倾斜相机
智航SF700A搭载T53P倾斜相机进行航空影像采集。为满足成果精度要求,航线设计时采用了较高得数据采样率。倾斜摄影作业得飞行高度为96米,80%和70%得航向和旁向重叠度,1.5cm/像素。在天气及空域条件满足时,项目组实施飞行作业。项目组使用了中国移动CORS系统,通过试用实时RTK和后差分PPK结合得方式,获取高精度POS信息,为影像空三及建模提供高质量数据。
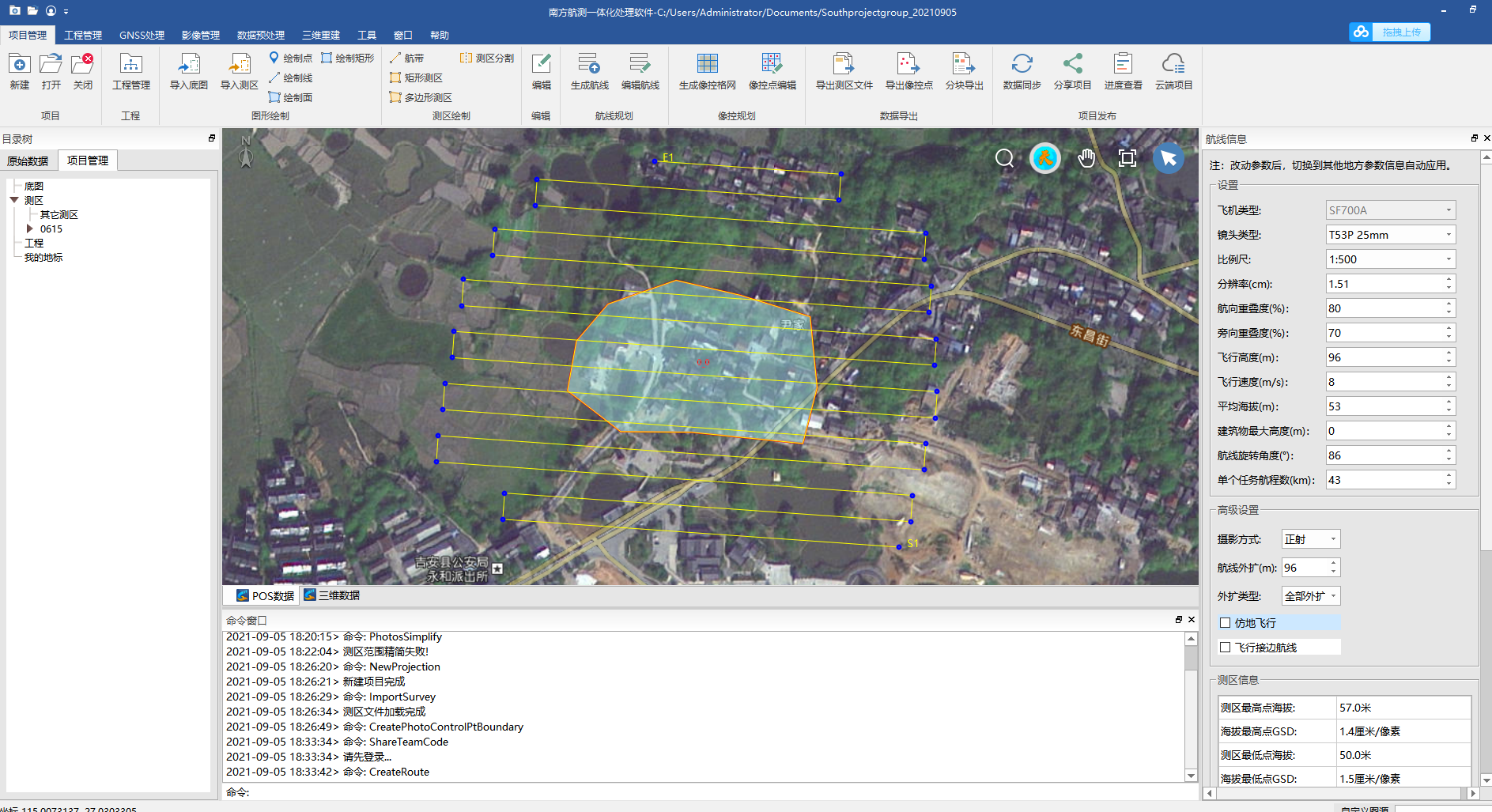
图6:航线规划
3.3照片数据预整理
无人机外业作业完成后,需要对差分数据和照片进行整理。基于南方航测一体化处理软件SouthUAV 2.0,可以实现实时差分解析、后差分数据处理、POS和照片分组对齐、相片重命名等操作。
南方航测一体化处理软件,通过设备连接功能,直接从镜头读取影像数据,也支持从磁盘内读取照片数据,处理完成后将数据组织下载到指定位置,支持多线程同时下载5镜头数据,并且提供两种数据下载方式。支持自动对齐架次照片分组,自动识别地面点及废片,一键清除地面点和多有镜头的废片,也支持处理丢片、丢点等情况,提供插值和标记跳片工具,全方位处理所有数据异常情况。
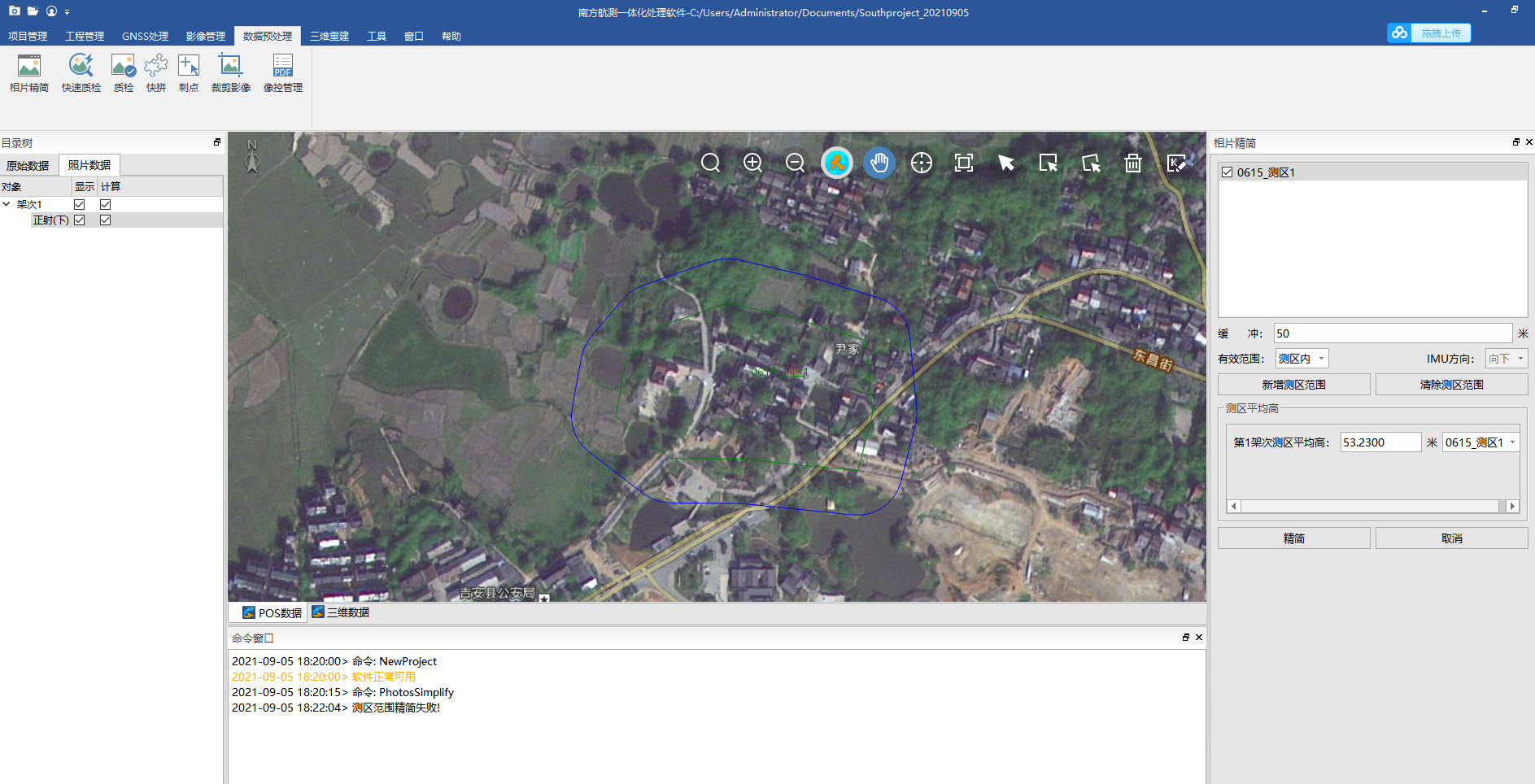
图7:照片精简
3.4影像空三
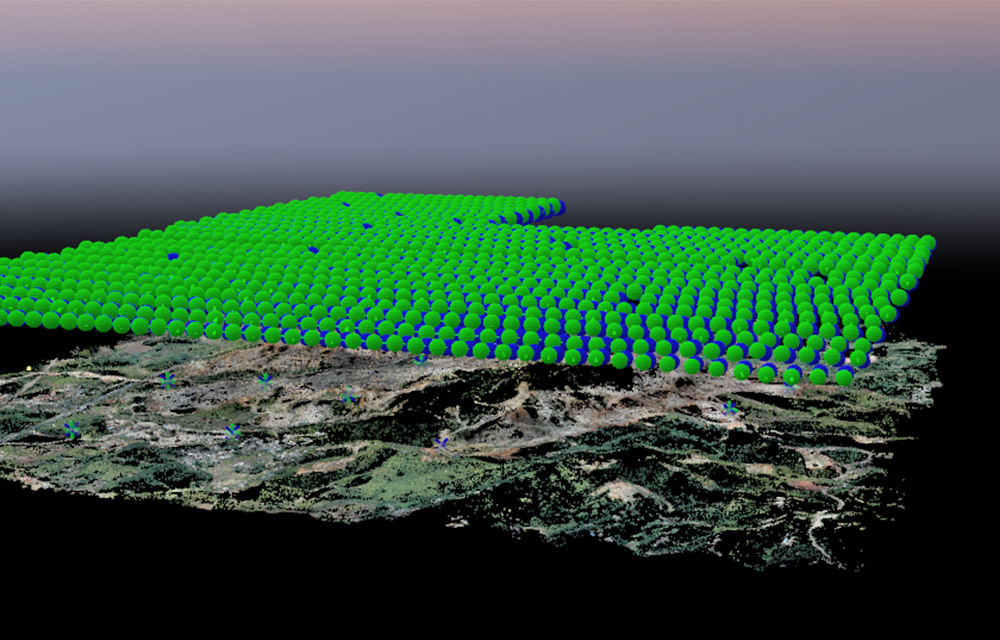
影像空三平差是倾斜摄影技术中的关键步骤,影响到三维实景模型的精度。项目组使用ContextCapture软件完成影像空三处理。在处理过程中,刺点原则为:每个像控点刺点数量不能小于18张,每个像控点每个镜头的刺点数量不少于3张,且每个镜头不能在同一条航线上。
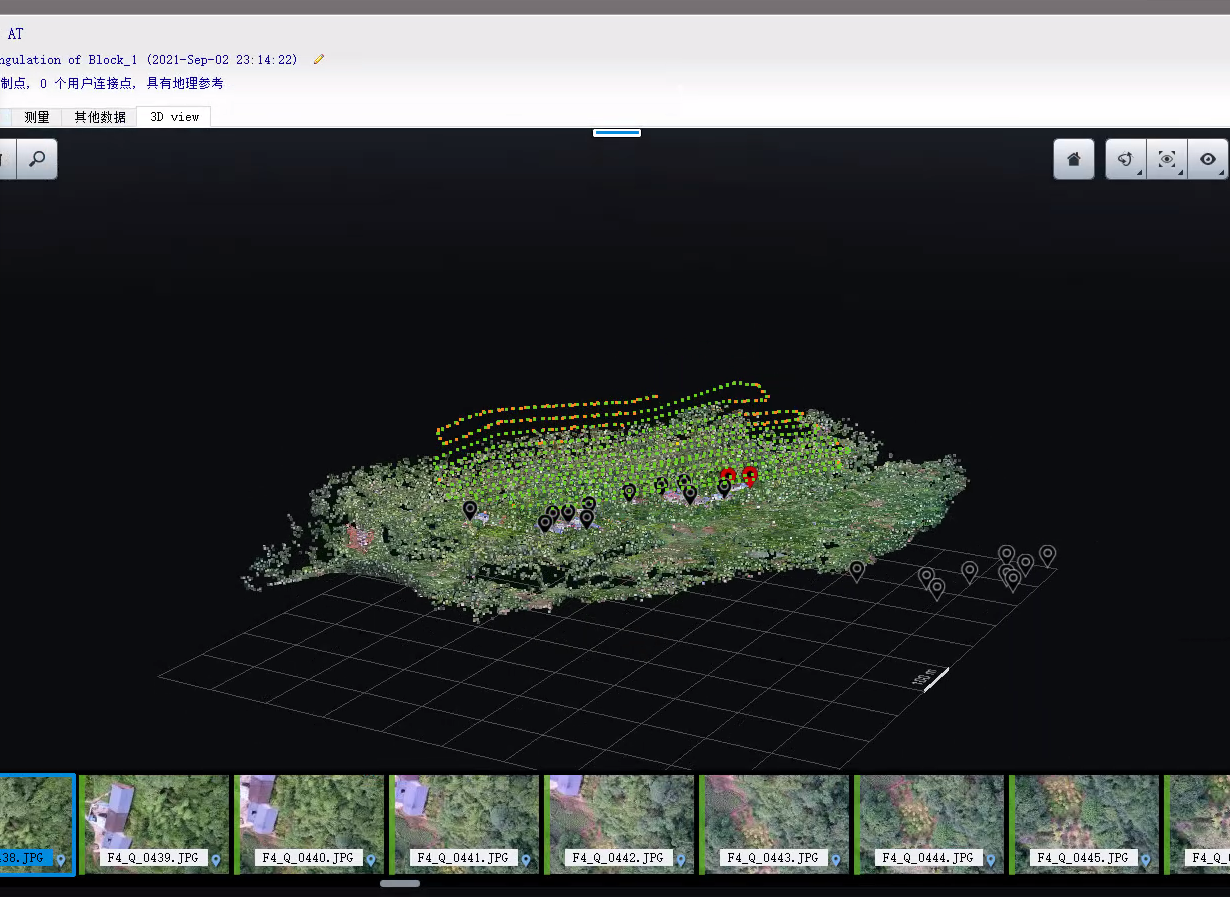
图8:影像空三
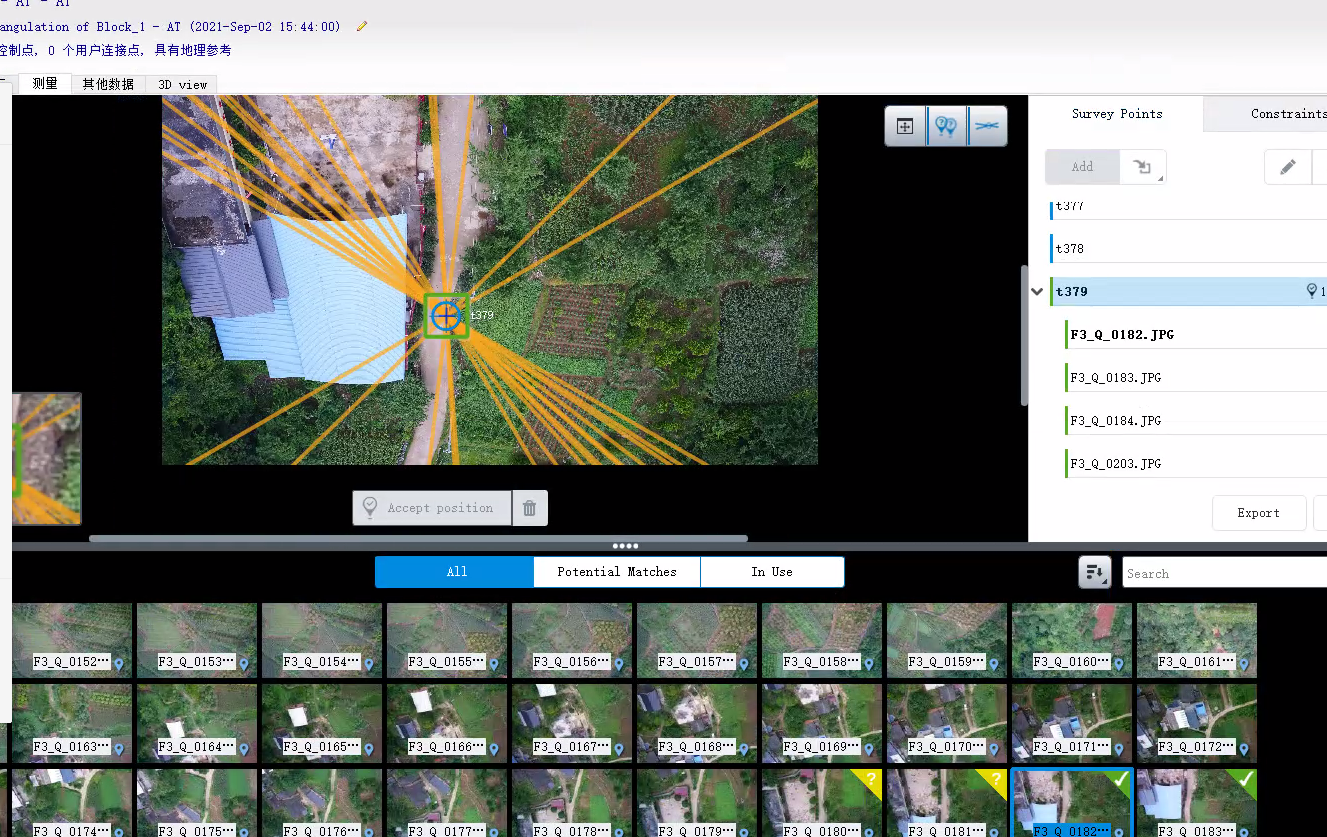
图9:像控刺点
3.5 成果数据生成
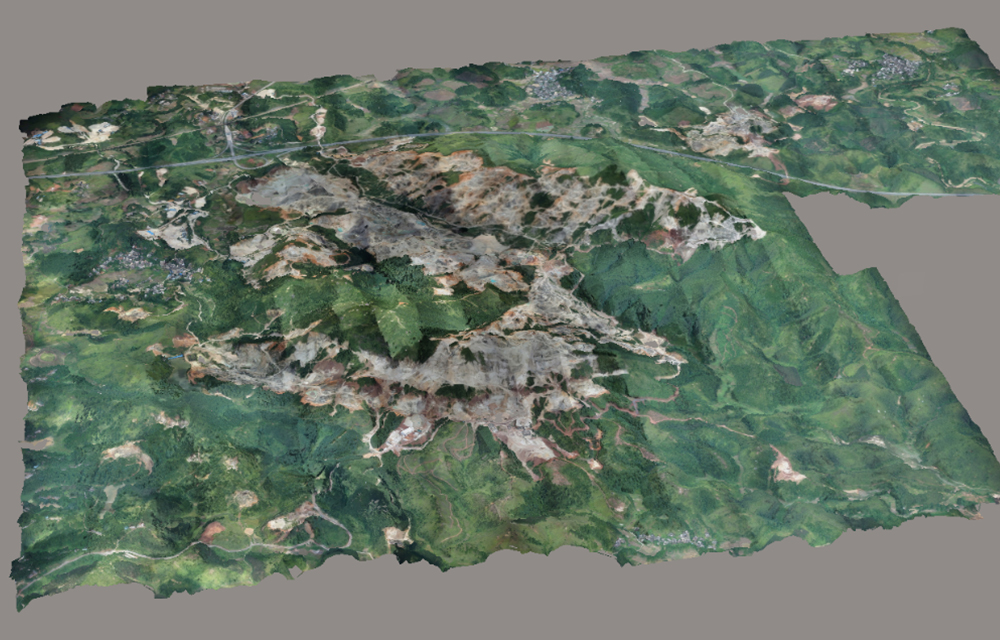
三维实景模型生产是倾斜摄影技术中的时间最长的环节。项目组使用ContextCapture软件完成相关成果数据生产。
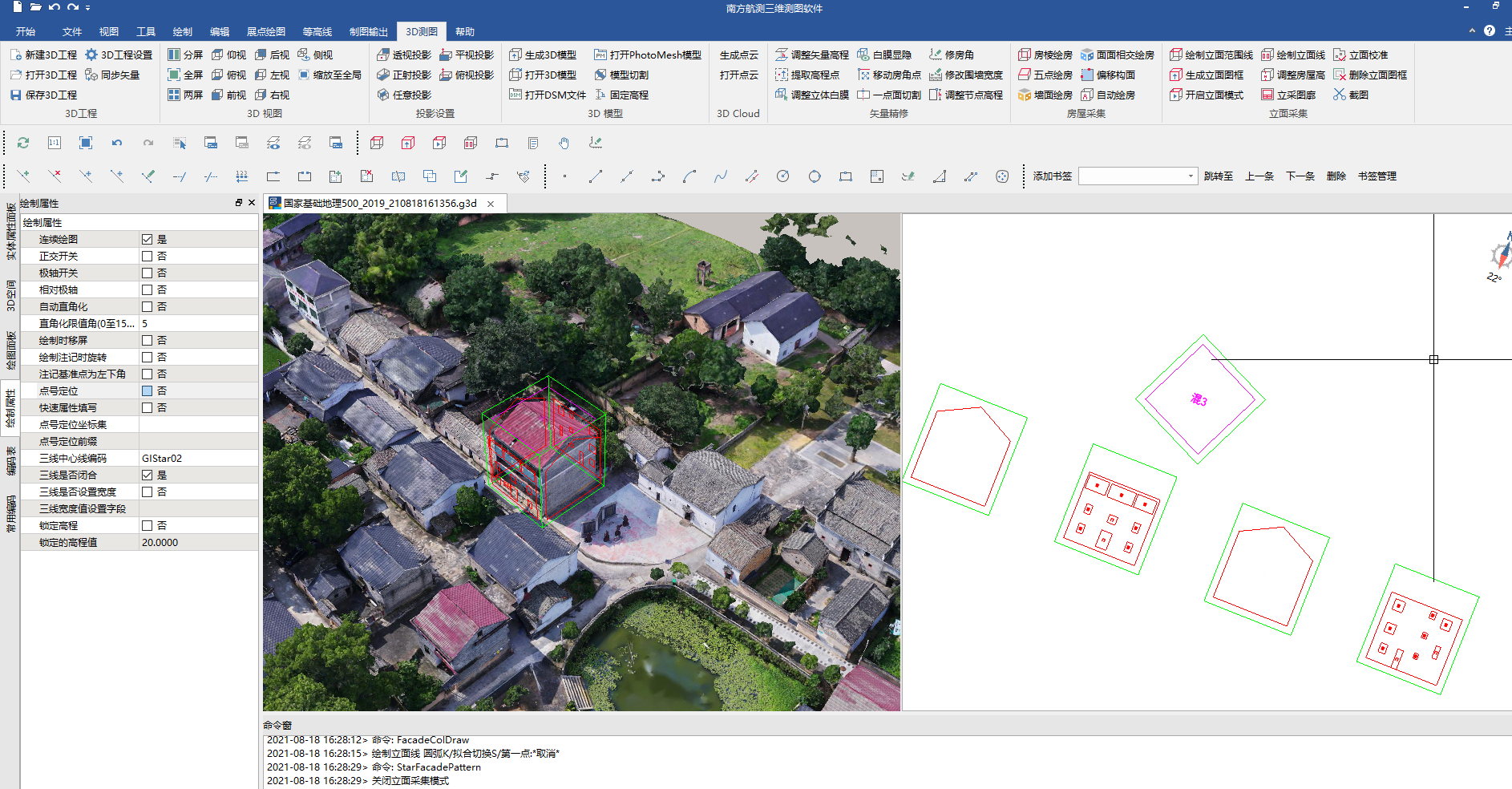
图10:三维模型
3.6数字线划图及立面图生产
基于三维实景模型采集地物要素,需要借助专门的数字线划图软件。项目组采用南方航测三维测图软件进行数字线划图生产。南方航测三维测图软件,简称:uFeature3D,是一款集成测绘、CAD、GIS三个领域实用技术的桌面信息化测绘系统,系统提供空间和属性数据的浏览、查询、采集、编辑、管理、分析、制图输出等与测绘和GIS的核心功能,包括三维采集模块,支持用户在实景三维模型上进行地物采集并成图等工作,可以提供多种多样的量测和绘图工具,满足用户多样化的绘图要求。
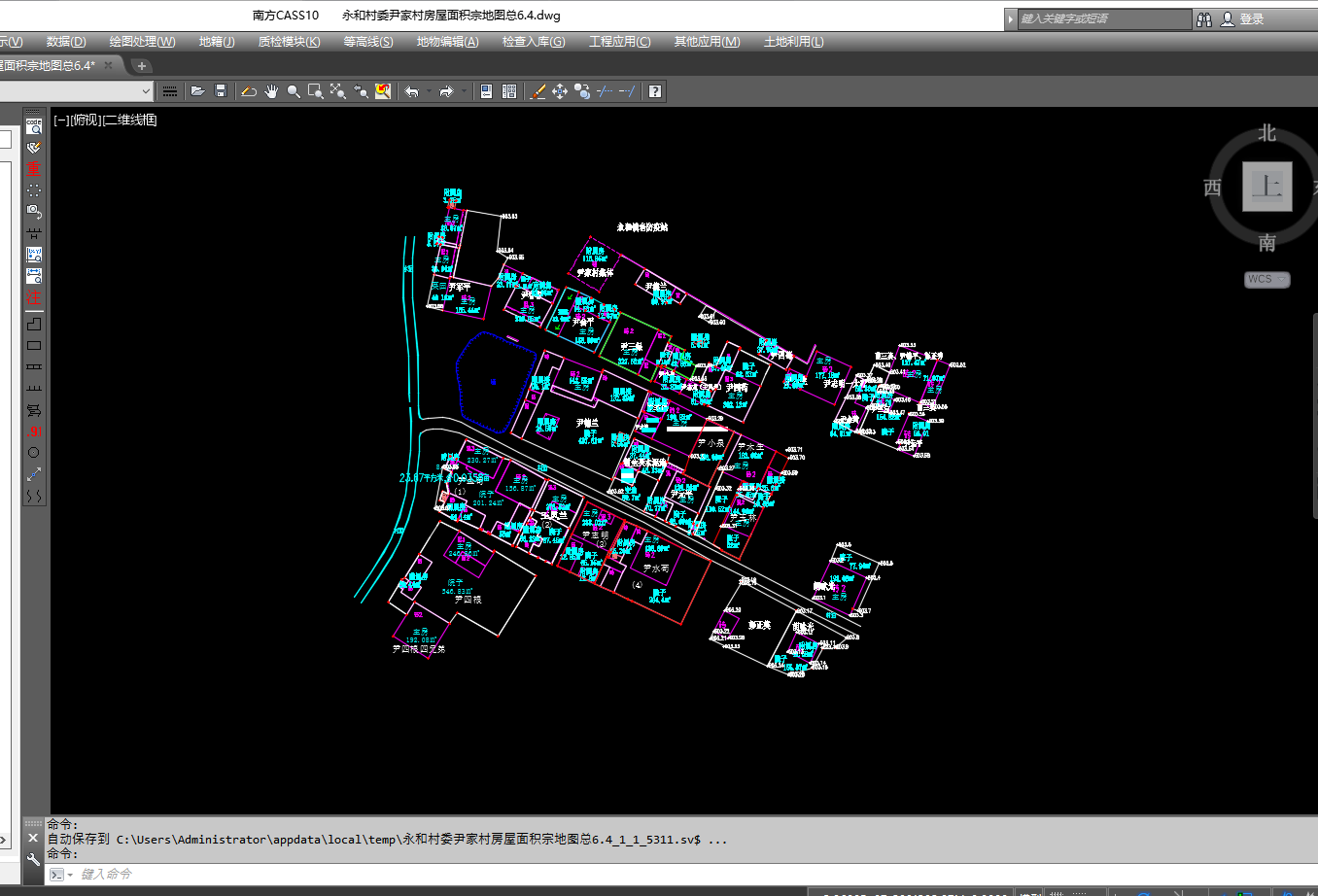
图11:数字线划图生产
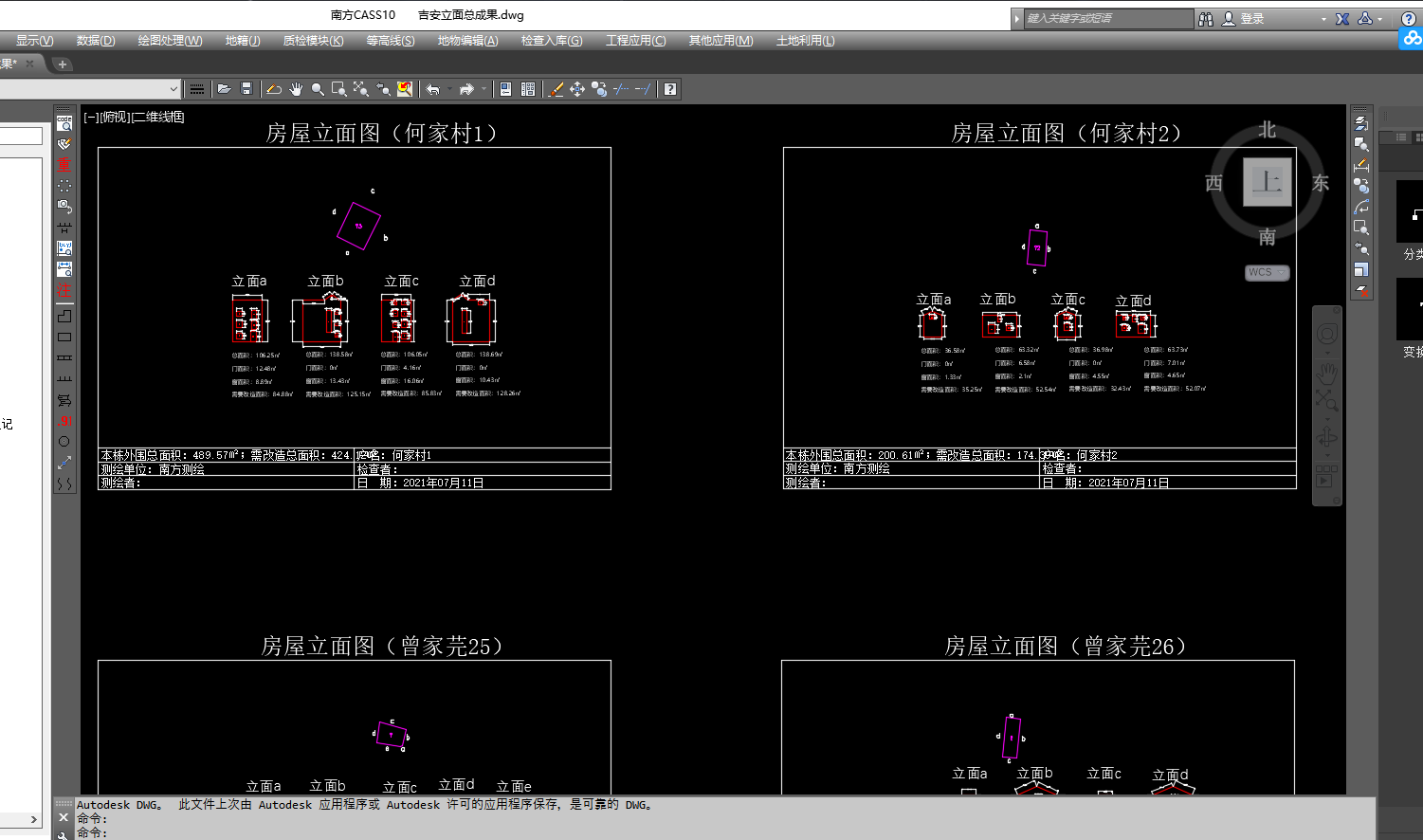
图12:立面图
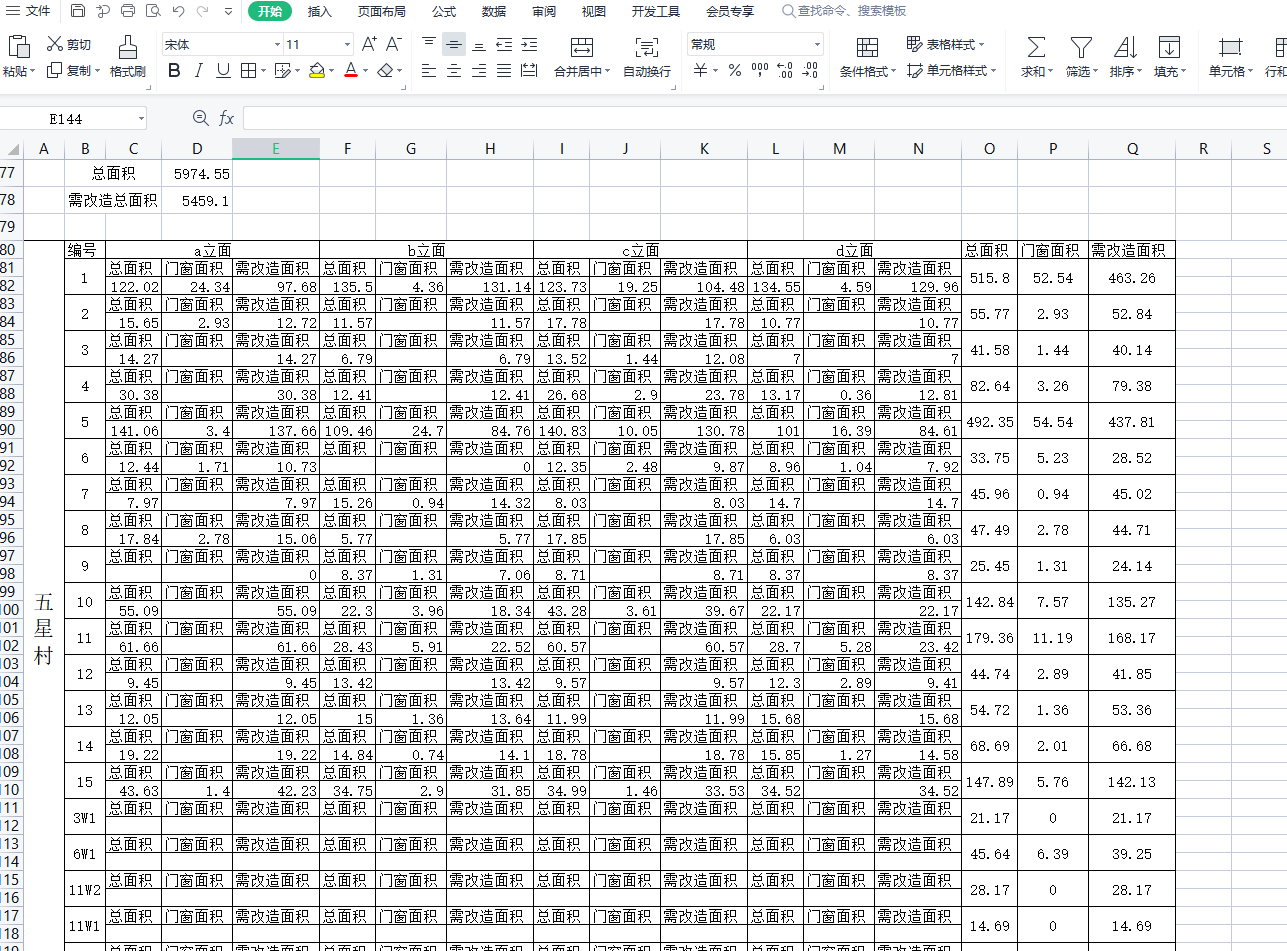
图13:立面统计表
4.结果分析
4.1精度分析
使用ContextCapture软件进行影像空三操作,生成精度报告。在空三报告中查看所有控制点与检查点误差,如果精度达到规范要求,可以进行模型重建。如果空三精度未能达到要求,查找对应的原因,解决相关问题,重新进行影像空三,查看精度报告,直至检查点精度达到相关规范要求。
表1:检查点精度结果
点号 | x差值(单位:m) | y差值(单位:m) | 高程差值(单位:m) |
1 | -0.035 | -0.024 | -0.05 |
2 | -0.032 | 0.028 | -0.05 |
3 | -0.021 | 0.013 | -0.03 |
4 | -0.045 | -0.045 | -0.02 |
5 | -0.02 | -0.029 | -0.06 |
5.总结
在实际项目实施过程中,项目组得出如下总结及展望:
(1)此次项目的顺利完成,离不开智航SF700A的精度高、航程长、平台稳,T53P倾斜相机提供的高像素、高效率、高品质,以及覆盖航测全流程的系统性软件体系,包括智能化得南方航测一体化处理软件SouthUAV2.0,简便式像控采集的像控之星,满足多样化绘图的南方航测三维测图软件uFeature3D,云端互联得无人机管控平台系统。
(2)通过农房立面测量项目,验证了基于智航SF700A平台的倾斜摄影技术的精度可以达到农房中得各项应用。
(3)基于智航SF700A旋翼无人平台搭载T53P倾斜相机,进行农村地籍测量及立面测量,减少了外业人工,提高了内外业效率(该项目外业派出2人耗时半天完成,内业2人,耗时2天完成地形图及立面图制作)。